
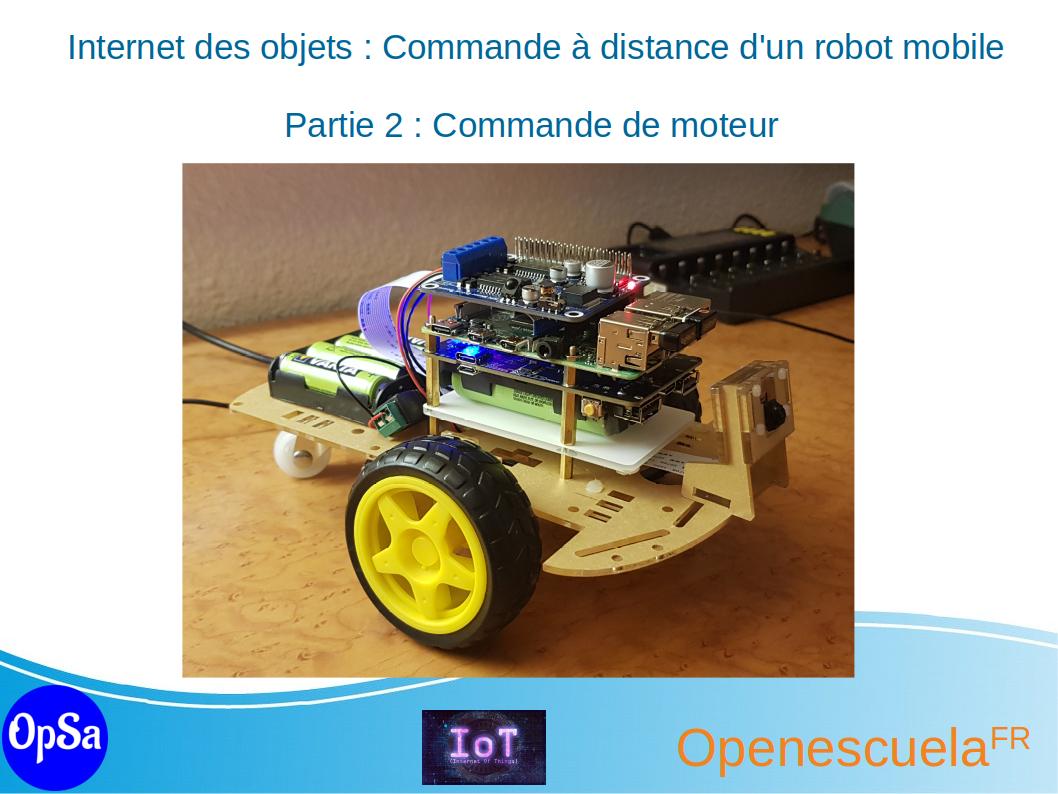
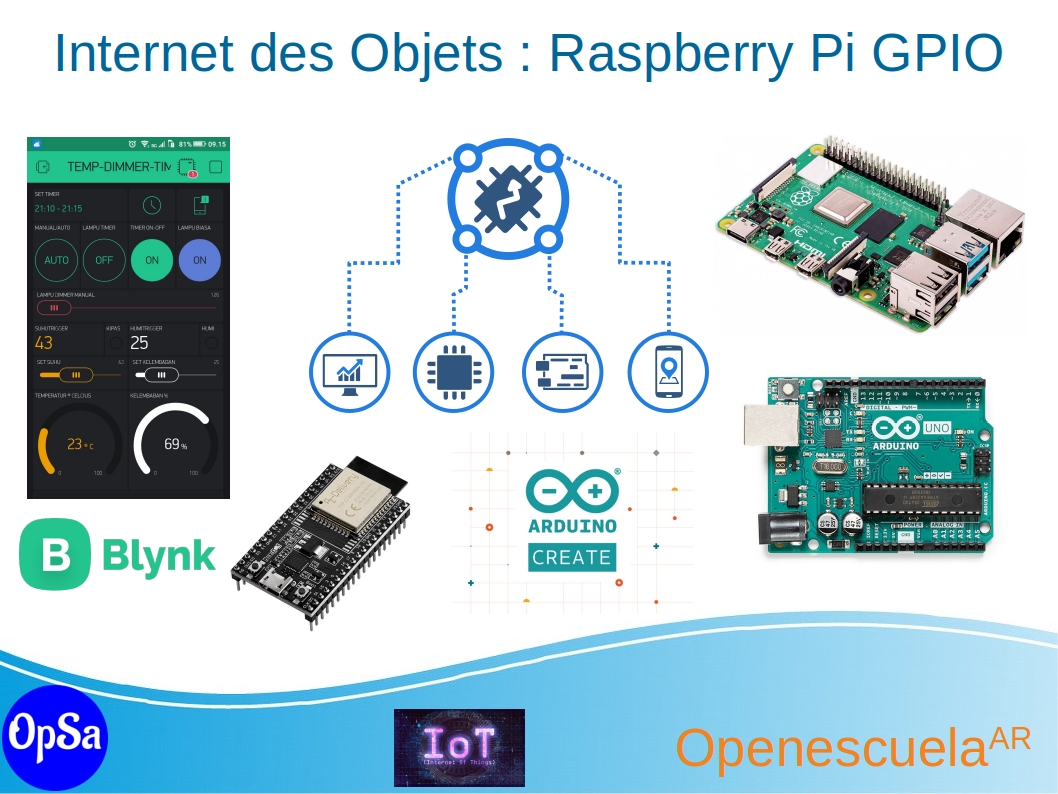
In this training, you will learn the basics of the Internet of Things. In this tutorial, you will learn how to remotely control a mobile robot based on a Raspberry Pi board. In this part, you will learn how to control the motors of the robot.
MotorDriver class:
import RPi.GPIO as GPIO
import time
class MotorDriver(object):
def __init__(self):
self.PWMA1 = 6
self.PWMA2 = 13
self.PWMB1 = 20
self.PWMB2 = 21
self.D1 = 12
self.D2 = 26
self.PWM = 50
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(self.PWMA1, GPIO.OUT)
GPIO.setup(self.PWMA2, GPIO.OUT)
GPIO.setup(self.PWMB1, GPIO.OUT)
GPIO.setup(self.PWMB2, GPIO.OUT)
GPIO.setup(self.D1, GPIO.OUT)
GPIO.setup(self.D2, GPIO.OUT)
self.p1 = GPIO.PWM(self.D1, 500)
self.p2 = GPIO.PWM(self.D2, 500)
self.p1.start(50)
self.p2.start(50)
def set_motor(self, A1, A2, B1, B2):
GPIO.output(self.PWMA1, A1)
GPIO.output(self.PWMA2, A2)
GPIO.output(self.PWMB1, B1)
GPIO.output(self.PWMB2, B2)
def forward(self):
self.set_motor(1, 0, 1, 0)
def stop(self):
self.set_motor(0, 0, 0, 0)
def backward(self):
self.set_motor(0, 1, 0, 1)
def left(self):
self.set_motor(1, 0, 0, 0)
def right(self):
self.set_motor(0, 0, 1, 0)
if __name__ == "__main__":
robot = MotorDriver()
dc = 40
while True:
robot.p1.ChangeDutyCycle(dc)
robot.p2.ChangeDutyCycle(dc)
robot.forward()
time.sleep(3)
dc += 10
if dc > 100:
break
robot.stop()
GPIO.cleanup()
KeyBoard control script
from motordriver import MotorDriver
import curses
robot = MotorDriver()
actions = {
curses.KEY_UP: robot.forward,
curses.KEY_DOWN: robot.backward,
curses.KEY_LEFT: robot.left,
curses.KEY_RIGHT: robot.right,
}
def main(window):
next_key = None
while True:
curses.halfdelay(1)
if next_key is None:
key = window.getch()
else:
key = next_key
next_key = None
if key != -1:
# KEY PRESSED
curses.halfdelay(3)
action = actions.get(key)
if action is not None:
action()
next_key = key
while next_key == key:
next_key = window.getch()
# KEY RELEASED
robot.stop()
curses.wrapper(main)

0 comment